MASI: Modules for Aerial and Satellite Imagery
Version 6.0 UAV Modules
Tutorial
|
|
|
|
VisionOnSky
Co., Ltd. |
|
|
www.visiononsky.com |

File
Version: v1.0
March
31, 2023
MASI: Modules for Aerial and Satellite Imagery
Version 6.0 UAV Modules
Tutorial
|
|
|
|
VisionOnSky
Co., Ltd. |
|
|
www.visiononsky.com |
File
Version: v1.0
March
31, 2023
Special Notes:
(1) Before starting the tour of MASI
software, please be sure that the installation manual and tutorials are fully read and
understood. If users need to know and exploit the software deeply, please
further read user manual of the software.
(2) Users can receive software license through two
manners. One is to download license from internet. If this manner is used,
users should provide us an e-mail address. We send the password to the e-mail
address via the Sense Shield (SS) Licensing platform. If you have not found it,
please check your e-mail trash (spam) box. The e-mail text may be written by
Chinese, but the English string is actually the password. The account used to
log in the SS (Sense Shield) middleware is your e-mail address and the password
is the English string sent to your e-mail box. After you download the software
license and bind it on your machine, you can use the software even though you
disconnect the internet. If the internet connection is not very stable, we recommend
that you disconnect the internet, otherwise a timeout error may happen. Using
this manner, users can download software package, tutorials, user manuals,
installation manual, etc. from website: http://www.visiononsky.com. The other
manner is to use a physical dongle to get the software license which is stored
in this dongle. You don’t need to provide us an e-mail address and don’t need
to log in in the SS middleware, just need to plug the dongle on computer. But
you still need to install the SS middleware. Using this manner, users should
contact us to get the software package and the package downloaded from the
website is invalid for the physical dongle.
(3) The file
name and the path name to be used in English version of MASI software should be
English characters, and the file name and the path name can
not include blank space.
(4) The full
path of file can not be too long (e.g., more than 200
characters). If it is too long, please shorten the full path of file.
(5) Please make
sure that there is enough free space in the disk where the work directory is
located.
(6) If text
editing is needed, editors such as UltraEdit, NotePad++ are highly recommended.
(7) Because of
the update of software version, some GUI interfaces of programs illustrated in
this tutorial are not the newest, which are changed and adjusted. The latest
user manual of the software provides the newest one, please refer to that
document.
(8) Any
feedbacks, suggestions, and problems, please send to the e-mail address:
jhyang@vip.163.com
History of Versions
Version 1.0: finishing the first
version of this document, tutorial of UAV modules. Time: Mar. 2023, Author: VisionOnSky Co., Ltd.
1 The brief introduction of UAV modules of MASI
Version 6.0
The functions in MASI Version 6.0 for UAV
images can be packaged as some relatively independent modules. The modules
include the following functions: undistortion, automatic multi-view
stereo and generation of highly dense DSM (as well as point clouds),
automatic 3D
modeling with true
color textures, automatic true ortho-rectification,
automatically transforming DSM to DTM (the height difference between DSM and
DTM is the height of building / tree), automatic finding change of surface
height (used
in the automatic finding of new buildings, the unplanned buildings and the
removed buildings, and estimating their corresponding accurate height),
automatic mosaic
(mosaic of DSMs, mosaic of ortho-rectified images, mosaic
of histogram matched images), volume
calculation, extraction of building attributes (the center position of building,
height of building, number of layers, area of ground, and construction area of
building), importing orientation results from third party software, image
displaying, interactive
editing of DSM/DEM, collecting polygons, and some commonly used
tools. These modules for UAV images are shown to users by a main
interface (uavMain.exe). After installing of MASI software, users can launch
the main interface by clicking the shortcut to uavMain.exe or directly
double-clicking the program, uavMain.exe, itself. Then, the corresponding functions
can be launched by clicking the icons in the interfaces.

Figure 1. The main interface (uavMain.exe) of
UAV modules
The features of UAV modules in MASI
Version 6.0 are as follows:
(1) Supporting consuming cameras used in UAV, e.g.,
Nikon, Canon, Sony; supporting middle-frame aerial camera,
RCD 30, PhaseOne, Hasselblad. Pixels of UAV images can not be more than 60 million. If images’ pixels are more
than 60 million, aerial modules should be used or new modules should be customized
by contacting us.
(2) GUI
operating manner and batch processing manner are
supported in MASI software. Only one push of button is needed to carry out DSM
generation and ortho-rectification of a UAV block.
User can also write batch files including commands to fulfill the pipeline
processing for a specific procedure. Distributed computing where multiple tasks
can be allocated to multiple machines is also supported.
(3) Modules
demanding large computation requirements, such as automatic multi-view stereo and DSM
generation, and mosaicking, have capability of
parallel computing. Thus, the computational resources can be fully exploited.
(4) Supporting
different operating systems, either Windows OS or Linux OS. MASI can run on the
commonly used PC computer, and cluster computer usually located in data center
or supercomputer center. This tutorial is based on Windows OS. If you need the
document of usage of MASI on Linux OS, please contact us.
For more
details about functional features and technique traits, please refer to the
document of Product Descriptions and Typical Applied Cases.
2 The automatic
processing flowchart for UAV image

Figure 2. The automatic processing
flowchart for UAV image
In the
flowchart, each step corresponds to a function in UAV modules as follows:
(1) Importation
of orientation parameters from third party software. Currently in MASI Version 6.0 there
is not a function of aero-triangulation for UAV images, but the results of aero-triangulation
from mainstream software can be used in MASI software.
Clicking the icon showing “Orientate” in the main interface,

The following menu will pop up.

Please use the program, i.e., importFromPix4d.exe, if
users need to directly import the results of aero-triangulation from Pix4D
software; please use the program, i.e., importFromPhotoScan.exe, if users need
to directly import the results of aero-triangulation from PhotoScan
software; please use the program, i.e., importFromCC.exe, if users need to
directly import the results of aero-triangulation from ContextCapture
software. Others’ results, e.g., from Inpho
software, can be used in MASI software directly.
(2) Undistortion
(optional for some cases). UAV image is usually captured by the calibrated
civil camera. Thus, the undistortion operation is
demanded to remove the distortion caused by lens, which is convenient for the
further processing. If the image is undistorted, the step is discarded. For
instance, the output undistorted images from Pix4D software (stored in the path: ..\project name\1_initial\images\undistorted_images) is
images after undistortion. If they are used in MASI, the step does not need. If
in the first step the orientation results from Pix4D software are imported into
MASI, the undistorted images from Pix4D software must be used. Or the programs,
undistortForPix4D.exe and undistort4Pix4DForm.exe, are used to undistort UAV images according to calibrated parameters
exported from Pix4D software, the calibrated model adopted in the programs is
the same as that of Pix4D software. The undistorted results for UAV images are
also the same as those undistorted results exported from Pix4D software. But,
the module in MASI software supports more data types and more bands, and
supports hyper-spectral image very well. For more details, please
refer to user manual. The case is similar
for usage of the results of aero-triangulation from PhotoScan software. The
undistorted UAV images from PhotoScan software should
be used, or UAV images are undistorted by the lensCorrection.exe provided by
MASI software.
Please ensure
that the distortion model used in the course of calibrating the camera is the
same as the model used in undistortion modules of MASI
software. The sameness is a prerequisite. Currently in MASI
software two calibrated models are supported for undistortion.
One is called General model, which corresponds to the programs,
lensCorrection.exe and lensUndistortForm.exe. The coordinate definition and
calibrated model adopted in the program, lensCorrection.exe,
is the same as that of Australis software (i.e., 10-parameter
model employed in digital close-range photogrammetry). Nowadays in mainland
China, most cameras mounted on UAV and middle format cameras are calibrated
by using the model. Thus, images captured by these pre-calibrated cameras can
be undistorted by the module. The model is also suitable for the case where the
self-calibrated camera parameters are exported from PhotoScan software (the results in
the form of Australis software are saved). The other model supported
in MASI
software (via
the program, undistortForPix4D.exe) is the
same as that of Pix4D software. Thus, the calibrated parameters exported from
Pix4D software can be used in the model and the undistortion
function is also the same as that of Pix4D software.
There are two
ways to incorporate third party software with MASI software. One is that the
undistorted images and orientation results both from the same third party
software are imported into MASI software. The other is for the third party
software without undistortion function. In this way, undistortion is carried
out firstly in MASI software (ensure the sameness of the distortion model in
calibration as the model used in MASI), the undistorted images are then used in
the third party software for aero-triangulation. After aero-triangulation, the
orientation results from the third party and the distorted images are used in
the following steps, such as multi-view stereo and DSM
generation, and ortho-rectification.
Clicking the
icon showing “Undistort” in the main interface,

The following menu will pop up.

(3) Automatic multi-view
stereo and DSM generation. For each image in a
UAV block, the
program selects, in these images which are overlapped with the image, some
suitable images to fulfill multiple view stereo and intersection of 3D points
together with the image. And then, the program tries to generate
dense point clouds for each image (users can decide whether the text-formatted
point clouds files with extension .xyz are saved by setting the configuration
option). These point clouds are transformed to DSMs and these DSMs are
mosaicked. At last, a mosaicked DSM covering the whole UAV block is generated
(the DSM before interpolation). Clicking the icon showing “DSM” in the main
interface,

The following menu will pop up.

The command item, Easily used Model, in the above menu is to call the function of
multi-view stereo and DSM generation. After
processing, a mosaicked DSM (the DSM before
interpolation) is generated.
Please note that the input images must
be undistorted image and the program can only deal with the image whose pixels
is less than 60 million. If images’ pixels are more than 60 million, aerial
modules should be used or new modules should be customized by contacting us.
(4) Post processing for DSM: The above mosaicked
DSM has some
areas which have not height value (before interpolation these areas are filled
by using no-data values). In this step, these areas with no-data value are
interpolated, and outliers (or small spots of
errors) in the resultant DSM after interpolation are removed. The output of this step
is the product of dense DSM, which is generated by this software. The DSM
product can be used in different applications followed (e.g., volume
calculation, finding
change of surface height, extraction of the height of building / tree). The
command item,
Post Processing, in the above menu is to call the function of
post processing for DSM.
(5) Automatic true ortho-rectification:
The program uses the DSM source generated in Step 4 to ortho-rectify all images
in a UAV block. For each image, an ortho-rectified image is generated. These
ortho-rectified images are mosaicked and an ortho-mosaic image covering the
whole UAV block is generated. An alternative way is that DTM as a height
source, which can be from third party or generated by MASI software, is used to
ortho-rectify images. This way is more common. Because UAV images have high
overlapping ratios, DSM generated by MASI software is highly dense and has high
quality. We highly recommend that the highly dense DSM is used to fulfill true ortho-rectification.
Clicking the icon showing “True Ortho” in the main interface,

The following menu will pop up.

The command item, UAV
Ortho, in
the above menu is to call the function of ortho-rectification. After processing, an
ortho-mosaicked image is generated.
Please note that the input images must
be undistorted image and the program can only deal with the image whose pixels
is less than 60 million. If images’ pixels are more than 60 million, aerial
modules should be used or new modules should be customized by contacting us.
(6) Comparing
surface height and change finding. By comparing DSMs of different phases (generated
by MASI software), the program can automatically find change of the surface
height and calculate the value of changed height. It can be used in the automatic
finding of new buildings, the unplanned buildings and the removed buildings,
and estimating their corresponding accurate height. The map of height
difference produced in this step can be used in the following extraction of
building attributes (the center position of building, height of building,
number of layers, area of ground, and construction area of building). Clicking
the icon showing “Surface Change” in the main interface,

The operating
interface of the function will be launched.
(7) Automatic
DSM2DTM: The program
deletes the non-grounded objects like buildings, trees in DSM and transforms
DSM to DTM where the pure ground height is saved.
Clicking the icon showing “DSM to DTM” in the main interface,

The operating
interface of the function will be launched.
(8) Height estimation of building / tree. The
height difference between DSM and DTM (nDSM) is the
height of building / tree. The height difference (raster form) produced in this step can
be used in the following extraction of building
attributes (the center position of building, height of building, number of
layers, area of ground, and construction area of building). DSM is generated by
the functions in MASI software (including post processing for DSM), and DTM can
be produced in the step 7 in this flowchart. Clicking the icon showing
“Building height” in the main interface,

The operating
interface of the function will be launched.
(9)
Applications. The generated dense DSM, map of height difference, nDSM
(i.e., height of building / tree) in above steps can be passed to the
application functions which fulfill volume calculation and extraction of
building attributes (the center position of building, height of building,
number of layers, area of ground, and construction area of building). Clicking
the icon showing “App” in the main interface,

The following
menu will pop up.

Currently two applications modules are included, i.e.,
volume calculation and automatic extraction of building
attributes in the light of buildings footprints. The command item, Calculate
Volume, in the above menu is to call the function of volume
calculation.
The GUI program called from the command item is calVolumeForm.exe. Also,
the GUI program can be launched by double-clicking the program directly. For more
details, please refer to “Usage of the calVolume.exe and calVolumeForm.exe programs”.
The
command item,
Extract Buildings’ Attributes, in the above menu is to call the function of
extraction of building attributes. The GUI program called from the command item is extBldgAttributesForm.exe. Also,
the GUI program can be launched by double-clicking the program directly. For more
details, please refer to “Usage of the extBldgAttributes.exe and
extBldgAttributesForm.exe programs”. In the course of volume calculation and
automatic extraction of building attributes, the bounds in the form of polygon
are needed. Users can click the command item, Polygons Drawing Tool, in above
menu to launch the interactive tool, collectPolygons.exe, to collect polygons
and save them.
(10) 3D modeling
with true
color textures. Images and highly dense DSM
generated in previous steps are used to generate 3D TIN models with true
color textures. The 3D models are in a form of tiled mesh. The data type of the
images which are used for texture mapping is unsigned 8 bit integer. If it is
not, user should stretch the images to unsigned 8 bit using the autoStretch.exe
program provided by MASI software. Clicking the icon showing “Textured 3D Model”
in the main interface,

The following
menu will pop up.

The command item, textured 3D modeling, in the above
menu is to call the function of 3D modeling. The GUI program called
from the command item is aerialScene3DForm.exe. Also, the GUI
program can be launched by double-clicking the program directly. For more
details, please refer to “Usage of the aerialScene3D.exe and aerialScene3DForm.exe programs”.
In addition, other functions are included: image
displaying, interactively
editing of DSM/DEM, collecting polygons, automatic mosaic (mosaic of
DSMs, mosaic of ortho-rectified images, mosaic of histogram
matched images),
transforming RGB image to grey image, rotation of image,
reflection of image, transforming point clouds to surface in the form of
raster, transforming DSM with raster form to point clouds, image cropping,
creating overviews for image.
The method of format transform for point clouds
generated by MASI software: the file of point clouds generated by the software
is text format, which can be transformed to LAS format through the following
steps. In the course of transform, a third party software package OSGeo4W
(including the open source library, i.e., libLAS) is
exploited. The package can be downloaded from the official website of OSGeo4W.
The steps are as follows:
(1) Translation to LAS format: the command, namely
txt2las.exe (OSGeo4W package includes the program), in the open source library,
libLAS, can be used to translate the point clouds
with text format to the LAS file. The corresponding command is as follows:
>txt2las.exe -parse xyz -i filename.xyz
-o filename.las
(2) Assigning RGB values: the command, namely
las2las.exe (OSGeo4W package includes the program), in the open source library,
libLAS, can be used to assign the RGB values from
truly ortho-rectified image to the points in LAS
point clouds file. The colored point clouds are obtained. One example of the
command is as follows:
>las2las.exe
-i points.las --color-source ortho.tif
-o points_rgb.las --file-format 1.2 --point-format 3
--color-source-scale 256 --color-source-bands 1 2 3
3 The flowchart sample of UAV images
In the
following, the flowchart will be illustrated through a sample. First, the main
interface of the UAV modules is launched via the Windows Start menu, i.e.,
calling the program, uavMain.exe. The launched main interface is as follows:

Clicking the icons in
the main interface is to call the corresponding functions. The main steps of
the flowchart sample are as follows:
Step 1: Importation of orientation parameters from third
party software
Clicking the
icon showing “Orientate” in the main interface,
The following menu will pop up.

(1) Using the
results of aero-triangulation from Pix4D software
It is assumed
that the results of aero-triangulation from Pix4D software are imported. If the
results of aero-triangulation are from other software, please refer to the
coming description. Clicking the button of “import from Pix4D” in the above
menu is to trigger the action of importation. The operating interface is as
follows:

In the section
of input setting, the files outputted from Pix4D software are selected,
including the camera file and the file of orientation parameters defined in
Pix4D software. The two files are located in the direcotry, ..\project
name\1_initial\params\. In the section of
output setting, the names of transformed files, i.e., the file
of interior parameters of camera and the list file of exterior elements defined
and used in MASI software, are set.
After files are transformed correctly,
the dialog box will pop up.

The output
files, the file of interior parameters of camera (interiorfile.dat)
and the list file of exterior elements (oriList.dat)
can be directly used in the coming steps, such as multi-view stereo and
DSM generation, and true ortho-rectification. The
content of the file of interior parameters of camera is as follows:

Defining of
each line in the file (the definition of the underlying coordinate system is
outlined in Appendix III of user manual):
Line 1 is the X
coordinate of principal point in image coordinate system;
Line 2 is the Y
coordinate of principal point in image coordinate system;
Line 3 is the X
coordinate (Unit: mm) of principal point in camera coordinate system (the
center of the camera as the original point in the coordinate system);
Line 4 is the Y
coordinate (Unit: mm) of principal point in camera coordinate system (the
center of the camera as the original point in the coordinate system);
Line 5 is the
focal length of the camera (Unit: mm);
Line 6 is the
pixel size of the camera (Unit: mm).
The
content of the list file of exterior elements is as follows:

Each line corresponds to exterior
elements of an image, and these lines are arranged in sequence. First element
is the image ID which is followed by six exterior elements (Attention:
the first element, image ID, do not include extension of image file).
The six elements are three linear elements and three angle elements. The order
of these exterior elements is first linear elements then angle elements, and
rotation system is omega-phi-kappa. The unit of rotational angle is degree.
Because the results
of aero-triangulation from Pix4D software will be used in MASI software, the
undistorted images exported from Pix4D software should be adopted. Or the
programs, undistortForPix4D.exe and undistort4Pix4DForm.exe, provided by MASI
software, are used to undistort the images according
to calibrated parameters exported from Pix4D software. The undistortion
function is the same as that of Pix4D software. For more details, please
refer to user manual. The undistorted
images, which are saved in the direcotry, ..\project name\1_initial\images\undistorted_images, will be directly
used in multi-view
stereo and DSM generation, and ortho-rectification. If the directory does not exist, the
following operation can be used to generate the undistorted images:
Clicking the
menu, Process -> Save Undistorted Images,
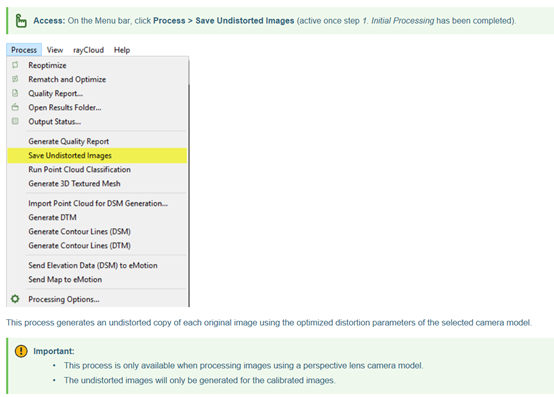
(The figure is from the official
website of Pix4D software. For more details, please refer to the technical
support articles on the website)
(2) Using
the results of aero-triangulation from PhotoScan software
If the results
of aero-triangulation from PhotoScan software need to be used in MASI
software, firstly the camera parameters and the camera positions (i.e.,
orientation) should be exported from PhotoScan software as well as the
undistorted images via the following operations:
Exporting camera parameters:
Clicking the
menu, Tools -> Camera Calibration,

The following interface will pop up, and
then the tab “Adjusted” is selected.

Clicking the saving button in the right
side:
![]()
The “Save As” dialog box will pop up as
shown as follows:
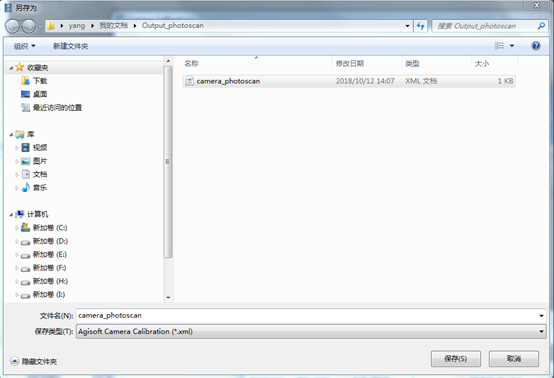
The type “Agisoft Camera Calibration
(*.xml)” is selected in Save as type. After input the file name, click the
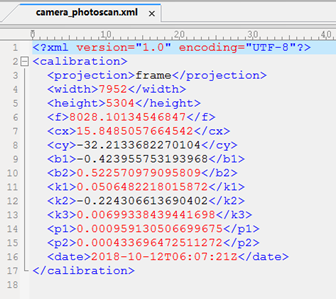
button of Save. A XML file with .xml extension is generated. The content of the
file is as follows:
Exporting camera positions
(orientation):
Clicking the
menu, File -> Export -> Export Cameras,

First, the dialog box to select
coordinate system will pop up.
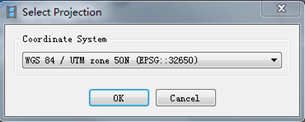
The coordinate system is the one which
is used to depict camera positions for each photo (i.e., the three linear
elements in the exterior elements). Since MASI software only supports the cases
where the exterior elements can be depicted by local rectangular coordinate
system or projected coordinate system, here the projected or local coordinate
system can only be selected as coordinate system, e.g., UTM, TM or the defined
local rectangular coordinate system. After the OK button is clicked, the “Save
As” dialog box will pop up as shown as follows:

The type “Omega Phi Kappa (*.txt)” is
selected in Save as type. After input the file name, click the button of Save.
A text file with .txt extension is generated. The file includes the exterior
elements of photos and will be used in the coming operation of importing.
After camera parameters and camera
positions (orientation) are exported from PhotoScan software, the coming step
is to export undistorted images. Clicking the menu, File -> Export ->
Undistort Photos,

The setting dialog box will pop up:

The setting options are configured as
the above figure. After the OK button is clicked, the undistorted images are
generated. The undistorted images generated in this step will be used in the
following multi-view stereo and DSM generation and ortho-rectification in MASI
software. Or UAV images are undistorted by the
lensCorrection.exe provided by MASI software. But the calibrated camera
parameters to be used in MASI software must be
the form used in Australis software. The camera parameters can be
exported from PhotoScan
software via the menu, Tools -> Camera
Calibration, as described previously. But in the “Save As” dialog box,
the type “Australis Camera Parameters
(*.txt)”
is selected in Save as type. Please also see the following section. For
more details, please refer to user manual of PhotoScan
software.
After finishing
the above exporting operations from PhotoScan software, users then call the
corresponding importing operations provided in MASI software. Clicking the
button of “import from PhotoScan” in the above menu is to trigger the action of
importation. The operating interface is as follows:

In the section
of input setting, the files exported from PhotoScan software are selected,
including the camera file and the file of camera positions defined in PhotoScan
software. In the section of output setting, the names of transformed files,
i.e., the file of interior parameters of camera and the list file of
exterior elements defined and used in MASI software, are set. The setting is
shown as the above figure. After the execute button is clicked, the
transformation will carry out.
After files are transformed correctly,
the dialog box will pop up.

The output
files, the file of interior parameters of camera (interiorfile.dat)
and the list file of exterior elements (oriList.dat)
can be directly used in the coming steps, such as multi-view stereo and DSM
generation, and true ortho-rectification. The formats
of the resultant files are described as the previous sections. The format of
exterior file: the order of the six exterior elements after image ID is first
linear elements then angle elements, and rotation system is omega-phi-kappa.
The unit of rotational angle is degree.
(3) Using
the results of aero-triangulation from ContextCapture
software
If the results
of aero-triangulation from ContextCapture software
need to be used in MASI software, firstly a file with BlocksExchange
XML format should be exported from ContextCapture
software
as well as the undistorted images via the following operations:
Clicking the
menu, Block -> Export -> Export block, users should select the output
format, output file and options; and click on Export block to create the XML
file.
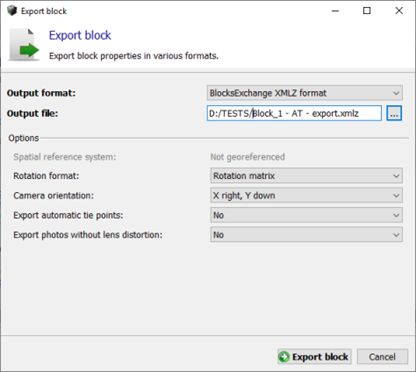
(This interface
is the possible pop-up dialog, the setting on the dialog is not suitable for
MASI software, please see the following description)
Output format: BlocksExchange XML format should be selected.
Output file:
the filename set for the exported XML file
The setting of
options is as follows:
Spatial
reference system: select the coordinate system used to write 3D positions and
rotations. Only local rectangular coordinate system or
projected coordinate system should be selected in order to be used in MASI
software.
Rotation
format: select how rotations are written, Rotation matrix or Omega, Phi, Kappa
angles. Only Omega, Phi, Kappa angles should be selected in order to be used
in MASI software.
Camera
orientation: select the axis convention for rotations. X right, Y up should be selected
in order to be used in MASI software.
Include
automatic tie points: include automatic tie points in the export. Users can select
No for this option (or uncheck this option).
Export photos
without lens distortion: photos are undistorted according to the block's
distortion data and exported to JPG files in a sub-directory. Users should
select Yes for this option (or check this option) in order to be used in
MASI software.
After finishing
the above exporting operations from ContextCapture software,
users then call the corresponding importing operations provided in MASI
software. Clicking the button of “import from ContextCapture”
in the above menu is to trigger the action of importation. The operating
interface is as follows:

In the section
of input setting, the file with BlocksExchange XML format,
exported from ContextCapture software, is selected.
In the section of output setting, the names of outcome files, i.e., the file
of interior parameters of camera and the list file of exterior elements defined
and used in MASI software, are set. The setting is shown as the above figure.
After the execute button is clicked, the transformation will carry out.
After files are generated correctly,
the dialog box will pop up.

Because in ContextCapture software, photos grouping is supported. All
photos taken using the same physical camera, with identical focal length and
dimensions must be gathered in a photo group. The file with BlocksExchange
XML format may include multiple photo groups. The importing function provided
in MASI software can generate a pair of files (i.e., the file
of interior parameters of camera and the list file of exterior elements)
for
each photo group in the file with BlocksExchange XML format. The generated files for each
group are named in the following rules: the filename set by users ends with _X,
where X is the serial number of group (1 based). For instance, in the above
importing setting, the outcome files, interiorfile_1.dat (the file
of interior parameters of camera) and oriList_1.dat (the
list file of exterior elements) are generated for
the first photo group.
The output
files for each photo group, i.e., the file of interior parameters of camera
and the list file of exterior elements, can
be directly used in the coming steps, such as multi-view stereo and DSM
generation, and true ortho-rectification. The formats
of the resultant files are described as the previous sections. The format of
exterior file: the order of the six exterior elements after image ID is first
angle elements then linear elements. The order is different from the cases of
Pix4D and PhotoScan.
Please be careful. For more details, please refer to user manual of MASI
software. Rotation system is omega-phi-kappa. The unit of rotational angle is
degree.
(4) Using the results of aero-triangulation
from other softwares
The results of aero-triangulation
from other software, such as, Inpho, PhotoMOD can
be used in MASI software directly. The exterior
elements from different software may have different
formats in terms of order between linear and angle elements, rotation system
(or the rotation system is indicated by rotation matrix directly),
and the unit of angle, comparing with the above cases. Users only need set the
provided three options, in the light of the real case of the exterior elements,
in the coming steps, such as multi-view stereo and DSM generation, and
ortho-rectification (please refer to the coming steps), then the results of aero-triangulation
can be used directory.
Step 2: Undistortion (in this sample, this step does not
need to be carried out in MASI software)
This step does
not need to be carried out in MASI software. The undistorted
images from Pix4D software (stored in the path: ..\project
name\1_initial\images\undistorted_images) are exploited. Because in the first
step the orientation results from Pix4D software are imported into MASI and
will be used in the coming steps, the undistorted images from Pix4D software
must be used. Or the programs, undistortForPix4D.exe and
undistort4Pix4DForm.exe (called under the menu, Undistort
-> Undistort for Pix4D), are used to undistort UAV images according to calibrated parameters
exported from Pix4D software, the calibrated model adopted in the programs is
the same as that of Pix4D software. The undistorted results for UAV images are
also the same as those undistorted results exported from Pix4D software. But,
the module in MASI software supports more data types and more bands, and
supports hyper-spectral image very well. For more details, please
refer to user manual.
If the
orientation results from PhotoScan software are used in MASI software, the undistorted
images from PhotoScan software must be adopted. Please refer to Step 1 to learn
how to export undistorted images from PhotoScan software. Or UAV images are
undistorted by the programs, lensCorrection.exe and lensUndistortForm.exe
(called under the menu, Undistort -> General Undistort), provided by MASI software. But the calibrated
camera parameters to be used in MASI software must be
the form used in Australis software, and they are the self-calibrated
camera parameters exported from PhotoScan software. The camera
parameters can be exported from PhotoScan
software via the menu, Tools -> Camera
Calibration, as described previously. But in the “Save As” dialog box,
the type “Australis Camera Parameters
(*.txt)”
is selected in Save as type. The values of self-calibrated
camera parameters in the saved file can be used for the parameters
setting
in the GUI program, lensUndistortForm.exe. For
more details, please refer to user manual of PhotoScan
software.
If the
orientation results from ContextCapture software are
used in MASI software, the undistorted images from ContextCapture
software must be adopted. Please refer to Step 1 to learn how to export
undistorted images from ContextCapture software. Or
the programs, undistortForPix4D.exe and undistort4Pix4DForm.exe (called under
the menu, Undistort -> Undistort
for Pix4D), are used to undistort images according to
calibrated parameters which are extracted from the BlocksExchange
XML format file exported from ContextCapture
software. The extraction is fulfilled by the program, fetchDistortFromCC.exe
(called under the menu, Undistort -> Extract
distortion parameters from ContextCapture), provided
by MASI software. The operating interface is as follows:

The program, fetchDistortFromCC.exe,
can generate a file of distortion parameters for each photo group in
the file with BlocksExchange
XML format. The generated file for each group is named in the following rules:
the filename set by users ends with _X,
where X is the serial number of group (1 based). For instance, in the above
extraction setting, the outcome file, camMASI_1.cam, is generated for the first
photo group.
The outcome
files (i.e., files of distortion parameters) can be directly used in the
programs, undistortForPix4D.exe and undistort4Pix4DForm.exe (called under the
menu, Undistort -> Undistort
for Pix4D). Images are undistorted according to calibrated parameters indirectly
exported from ContextCapture software, the calibrated
model adopted in the programs is the same as that of ContextCapture
software. The undistorted results for images are also the same as those
undistorted results exported from ContextCapture
software. But, the module in MASI software supports more data types and more
bands, and supports hyper-spectral image very well. For more details, please
refer to user manual.
If a third
party software has not the function of undistortion, the following operations
can be adopted. Firstly, undistortion is carried out in MASI software (ensure
the sameness of the distortion model in calibration as the model used in MASI),
the undistorted images are then used in the third party software for aero-triangulation.
After aero-triangulation, the orientation results from the third party and the
distorted images are used in the coming steps, such as multi-view stereo and DSM
generation, and ortho-rectification.
Step 3: Automatic multi-view stereo and DSM generation
Clicking the
icon showing “DSM” in the main interface,
The following menu will pop up.

By clicking the command item, Easily used Model, in the above menu, the
GUI program is launched. After processing, a
mosaicked DSM (the DSM before interpolation) is generated. The graphical
interface of the program is as follows:

First, all files required in the course
of multi-view
stereo and generation of DSM, such as images, the file of interior
parameters of camera and the list file of exterior elements (images are the
undistorted images from Pix4D software, the
file
of interior parameters of camera and the list file of exterior elements are
obtained in Step 1) are copied to a directory, e.g., H:\uav_tests\MASI, and set
it as work directory. When MASI graphical interface is used, all required files
should be put in the same directory and the directory is set as work directory.
Then, the file of interior parameters
of camera and the list file of exterior elements are selected, respectively, in
the section of input files in the interface. In the section of configuration
options, Extension of image means the adopted format of images. It can be TIFF
or JPEG, which are commonly used format for UAV image. The following three
options should be set according to the real case of the exterior elements. For
the orientation parameters from Pix4D software (or PhotoScan software), the
order of these exterior elements is first linear elements then angle elements, and rotation system is omega-phi-kappa. The
unit of rotational angle is degree. Thus, the selected values of the three
options are shown in the above figure of the operating interface.
If the results
of aero-triangulation from other software, such as, Inpho,
PhotoMOD, PixelGrid, are used, users should set the
provided three options in the interface (Order of exterior elements, Rotation
system, and Unit of angle), according to the real case of the exterior
elements. The different combination of the values of three options provided in
this software can support almost all formats of exterior elements from the
available aero-triangulation software. For more details, please refer to the
sections of multi-view
stereo and DSM generation for UAV images in user manual.
Height limit
has two choices: setting maximum and minimum heights from right side, and
selecting third part elevation file (The coordinate system of elevation file
must be the same as that of exterior elements), respectively. If users choose
to set height limit from right side, the maximum and minimum heights are values
of surface height (including height of the man-made objects) of the highest and
lowest points above sea level in the UAV block. The height value above sea
level is based on the adopted coordinates system. The maximum and minimum
height value of elevation can be extended, to some extent, i.e., increasing the
maximum value a little bit and decreasing the minimum value a little bit.
Rotation or not first: whether image
should be rotated in advance. For some cases, a specific rotation is required:
the layout of image that is used to determine orientation of image is different
from the layout of image which is saved in computer and used as input of the
program. There are four cases: none rotation,
rotation of clockwise 90 degree; rotation of anti-clockwise 90 degree, and
rotation of 180 degree. In this sample, no rotation is needed
in advance. If the exterior elements with PATB
format exported by Inpho software are adopted, the
images before multi-view
stereo may need to be rotated 180 degree
because the directions of coordinates defined in Inpho
software are different. Users can set to rotate images 180 degree via the
option.
Ratio of image size: the ratio of the
size of original image to the size of matched image. The size of matched image
can be the same as the original image, or can be reduced in the light of some
specific scale. Two cases are supported in the software: 1 means the size of
matched image in each dimension is the same as the original image, while 2
means the size of matched image is the 1/2 size of the original image in each
dimension. Reduction of size in the course of multi-view stereo
can lead to reduction of computational requirement and of the amount of data,
and also accelerate the process. But it also leads to
the loss of precision. Because multi-view stereo is adopted, the loss of
precision is relatively small. Users can select the value in the light of specific
requirements. In most cases, the default values can be used.
Delete intermediate files or not: users
can determine whether the intermediate files (epipolar and disparity images)
are deleted by setting the option. The epipolar images can be used in the
stereo displaying and further in the line-drawing in the stereo displaying.
Method to select height value: the
method how to select the height value when there are multiple 3D points in a
grid. The software supports three methods: max, min, average, which select
maximum, minimum, average height value, respectively. The recommended method is
max.
Overlapping ratio: the program can
flexibly deal with different cases where different users may acquire UAV images
with different overlapping ratios. Two choices are provided: high or low. If
the flight / side overlapping ratio is above 70/60, high can be selected; while
the flight / side overlapping ratio is about 60/30, low should be selected.
Save point
clouds or not: users can determine whether point clouds generated from each image
are saved as a text-formatted file with extension .xyz. The default setting is
no-saving.
Partitions and
Part ID: The two parameters are used for distributed computing on multiple
machines. The program, mvsNew.exe, can equally partition all images of the
whole block into different parts, in the light of the number of used computers.
Each part corresponds to a computer and is identified by a serial number. The
serial number is 0-based and integer type, its range is 0 ~ (Partitions - 1).
For the default setting in this form, partitions are 1, which means only one
computer is used for computation. All images are treated as one part and are
processed on this machine whose part ID is 0. Attention: MASI software need to
be installed on all computers used for computation and it should be ensured
that all used files including images, the list file exterior elements of the
whole block, the file of interior parameters of the camera and the
configuration file are accessed by each machine.
Number of used
threads per processor: setting the number of used threads (CPU cores or the
virtual CPU cores by using hyper-threading technology) per processor. For the
cases where CPU cores are enough, we suggest that number of 4, 6 or 8 is set here.
Bounding
polygon: users can determine whether a bounding polygon is used to limit the
region of multi-view stereo. After checking the checkbox, a shape format file
which includes a polygon for bounding should be selected. Compared to the
region bounded by the used polygon, the resultant region after the utilization
of bounding polygon in multi-view stereo may be extended a little bit. The
bounding polygon file can include only one polygon and its coordinate system
must be the same as that of exterior elements. For default setting, bounding
polygon is not used. The button of “Selecting File” in the right side is
invalid.
After the above options in the
interface are set, users can click “Save configuration” to save these options.
These configuration options will be saved in a configuration file, uavDSM.conf, and next time the options can be loaded from
the configuration file by clicking “Load configuration”. The configuration
file, uavDSM.conf, is also stored in the work directory. If “Execute” is
clicked, the configuration file will also be generated in the same way.
In the output
setting, users should set the filename of the mosaicked DSM (the DSM before
interpolation), the grid spacing (cell size) of the raster file used to store
height value (the value of grid spacing can not be
better than the actual ground sample distance, GSD, of image), the no-data
value used to fill in the area without height value in the raster DSM file (no-data
value).
Because the computational requirements for
multi-view stereo matching are large, the software supports parallel computing
to leverage advances of the multi-core computer. Serial or parallel processing
can be selected. If parallel processing is
selected, number of processors should be inputted as well as the current user
name using the Windows OS and password of the user. Next time users can load
the information by clicking the load button, and do not need input the
information again. Users should be very careful when selecting the number of
processors, which should be determined in the light of the number of available
CPU cores in the adopted machine, the size of physical memory and the size of
image frame. There are three points for selecting the number of processors.
First, the product of the value set in the option, Number of used threads per processor,
and the number of used processors here can not exceed
the total number of CPU cores (or the virtual CPU cores by using
hyper-threading technology). Second, all consumed memory can
not exceed the physical memory on the machine. In general, 3 G - 8 G
memory is consumed in one processor. The total number, i.e., multiplication of
the number of processors by the memory consumed in a processor, can not exceed the physical memory on the machine. Third,
requirements of disk reading and writing brought by multiprocessor processing can not exceed the disk capability provided by the machine.
User can get the information of consumed memory from Task Manager of Windows
OS, and the information of busy intensity of disk reading and writing and its
speed from Resource Monitor of Windows OS. Users who want to use parallel
computing in the software should be trained for a period of time, and know the
software and the principle behind the software more. At the beginning, ordinary
users are not expected to use parallel computing. In the course of using
parallel computing, if there are any problems encountered, please contact us as
soon as possible.
After finishing
the setting of configuration options, input and output setting, users can click
the button of “Execute”. The program starts to run and the required time to
finish the whole procedure is different according to the size of the UAV block.
In the course of computation, the buttons of “Execute” and “Cancel” on the
bottom of the form is invalid. The two buttons can not
be clicked in case they are clicked many times in the course of running. Users
can learn the progress and the running status via the re-directed output
printing (sometime printing may delay) on the right side. User can also check
the information of resources (CPU, memory and Disks) possessed by the program
from Task Manager and Resource Monitor of Windows OS. Once the execution of
mvsNew.exe is finished, a message box will pop up showing that the processing
is closed successfully or terminated (aborted). After clicking OK button on the
message box, the GUI program returns to the available status. Users can either
click the button of “Cancel” on the bottom or click the closing icon on the
up-right corner of the interface to close this GUI program. Or users can select
and set new input and output to fulfill a new task.
User can click
the button of “Terminate” on the bottom if they need to abort the processing
(not the closing of GUI form). The GUI program, uavDSMForm.exe, will kill the
process of mvsNew.exe which is being called. Killing the process of mvsNew.exe
may delay (less than one second or several seconds). Once the process is
killed, a message box will pop up showing that the processing is terminated
(aborted) or closed successfully. After clicking OK button on the message box,
the GUI program returns to the available status. Users can either click the
button of “Cancel” on the bottom or click the closing icon on the up-right
corner of the interface to close this GUI program. Or users can select and set
new input and output to fulfill a new task.
Attention: the
button of “Cancel” on the bottom is only for closing the GUI program. If the
called logical program (i.e., mvsNew.exe) is running, users should first click the
button of “Terminate” to abort the processing task or wait until the processing
task is finished, and then close the GUI program. Users can not click the
button of “Cancel” or click the closing icon on the up-right corner of the interface
to close this GUI program when the called logical program is running.
The blank area
of the right side will display the information printed by the command program,
and the printed information will also be saved in a log file named as uavDSM_ddMMMyyyyHHmmss_log.txt.
In the filename, dd are two digital numbers
indicating a date, MMM are three English characters indicating an abbreviation
of a month, yyyy are four digital numbers indicating
a year, and HHmmss are digital numbers indicating
hour, minute and second in the form of 24 hours.
All configuration
options are saved in the configuration file, uavDSM.conf,
through a certain type of form, in the course of running of program. The user
name and password used in the parallel processing are saved in the file named
as pwd.txt (If parallel processing is not used, there is no such file). The
configuration file, uavDSM.conf, can be used in the
function, Load Configuration. The file, pwd.txt, can be used to load user name
and the password which are used in the parallel processing. The printed
information in the course of running is saved in a log file named as uavDSM_ddMMMyyyyHHmmss_log.txt.
In the course of running of the program, the
intermediate files, i.e., epipolar and disparity
images are generated (these intermediate files can remain or be deleted
according to the corresponding configuration option). A text-formatted file of
point clouds with extension .xyz is generated for each image which has a
suitable overlapping with other images,
if point clouds are set to be saved. In this file, each line corresponds to one
point. A mosaicked DSM covering the whole UAV block
(if the default case is adopted, partitions are 1, which means only one
computer is used for computation) is generated (the filename is set in output
DSM file in output setting in the interface, and DSM is the one before
interpolation). If point clouds are set to be saved, a list file named “points_part%d_of_%dparts_List.txt”
is generated at the same time. The first %d from left to right in the filename
is replaced by the serial number of the partition (partID)
and the second %d is replaced by the number of partitions (Partitions). The
list file includes all filenames of point clouds extracted from multi-view
stereo matching which are distributed to the
machine. The format of the list is as follows:
DSC00305_points.xyz
DSC00306_points.xyz
DSC00307_points.xyz
DSC00308_points.xyz
DSC00309_points.xyz
….
All these files
are stored in the work directory. Except the above mentioned files, other files
generated will be deleted in the end of the program.
A useful method
to decide if arguments, parameters setting and command operations in this step
are correct is to check if the objects in the generated epipolar
pair are aligned strictly in horizontal direction. The vertical swipe function
in the module of image viewer, imgViewer.exe, provided by MASI software can be
used to view horizontal alignment. For more details, please refer to the
program usage of imgViewer.exe.
The DSM result
obtained in this step is the DSM before interpolation, which needs to pass to
the next step (i.e., post processing for DSM) to yield the final highly
dense DSM. Before post processing for DSM,
if the un-interpolated DSM has big areas of mismatching (e.g., water body,
cloud and snow covered area, area with repeated textures) which can be found by
the manner of visual checking, the interactive tool for editing DSM/DEM (i.e., collectPolygons.exe) can
be used to edit the DSM with big areas of mismatching. For more details, please
refer to “Usage of the collectPolygons.exe program”.
Step 4 Post processing for DSM
In this step,
these areas with no-data value in the above mosaicked DSM are
interpolated, and outliers (or small spots of errors) in the resultant DSM
after interpolation are removed. The output of this step is the product of
dense DSM, which is generated by this software. The DSM product can be used in
the different applications followed.

By clicking the command item, Post Processing, in the
above menu, the GUI program is launched. The
graphical interface of the program is as follows:

In the section
of “The DSM source”, the DSM before interpolation from the previous step is
selected, and in the section of “The DSM result”, the filename of resultant
DSM, which will be the outcome of this step of post processing, is set.
After the
interface is launched, the default values for these parameters are given. In
most cases, the default values can be used. The blank area of the right side
will display the information printed by the command program. The meaning of
parameters is as follows:
The maximum
size of the errors to remove: the size of the area of maximum errors to remove.
The number, 5, indicates that outliers up to the size of 5 x 5 can be removed.
The parameter is integer.
The threshold
of height difference: The point (or small areas) where height difference beyond
the surroundings is above the threshold is deemed as outliers. The parameter is
float and unit is meter.
The size of big
block: the size of big block which is used to divide the image. The DSM is so
large that block division is required. The parameter is integer.
The size of
overlap between big-blocks: the size of overlap between the adjacent big-blocks. The
parameter is integer.
According to
the features of the terrain of covered area, a filtering method for post-processing
is selected among no filtering (suitable for vegetation area), median filtering
(suitable for dense urban area), and mean filtering (suitable for smooth
terrain). In this sample, median filtering is selected.
Again, still by
the manner of visual checking, if on the interpolated DSM after post processing
small areas of errors is still found, the interactive tool for editing DSM/DEM
(i.e., collectPolygons.exe)
is continually used for editing. After editing, users can determine if post
processing for DSM is required again in the light of their needs. For more
details, please refer to “Usage of the collectPolygons.exe program”.
Step 5 Automatic true ortho-rectification
Clicking the
icon showing “True Ortho” in the main interface,
The following menu will pop up.

The command item, UAV Ortho, in the above menu is to
call the function of ortho-rectification. After
processing, an ortho-mosaicked
image is generated. The operating interface is as follows:

The concept of
work directory is the same as that in automatic multi-view stereo and DSM generation.
All files required in the course of ortho-rectification should be put in the
work directory. In the section of input files in this interface, the
file of interior parameters of camera and the list file of exterior elements
are the same as those in the step of multi-view stereo and DSM generation. Thus,
the directory, H:\uav_tests\MASI, is still set as the work directory in this
step.
All options
before the option, File of elevation source, are the same as those in the step
of multi-view
stereo and DSM generation. File of elevation
source: the full file path of the external elevation source used in the ortho-rectification. The result in Step 4, post processing
for DSM, is selected as the elevation source. The coordinate system of
elevation file must be the same as that of exterior elements and the elevation
file covers all the areas of these images. If third party elevation source is
used, please make sure the sameness of coordinate system. Resolution: the image
resolution (Unit: m) of the ortho-rectified image.
The resolution of ortho-rectified image can not be better than the actual GSD (ground spacing
distance). Ratios deleted in the X end and the Y end: the ratios need to be
deleted in the two ends for X, Y directions, respectively. The remained center
part of ortho-rectified image after deleted in ends
is a portion with high quality.
Number of used
threads: setting the number of used threads (CPU cores or the virtual CPU cores
by using hyper-threading technology). For the cases where CPU cores are enough,
we suggest that number of 4, 6 or 8 is set here.
After the above
options in the interface are set, users can click “Save configuration” to save
these options. These configuration options will be saved in a configuration
file, uavOrtho.conf,
and next time the options can be loaded from the configuration file by clicking
“Load configuration”. The configuration file, uavOrtho.conf,
is also stored in the work directory. If the button of “Execute” is clicked,
the configuration file will also be generated in the same way.
In the output
setting, users should set the output directory and the filename of the ortho-mosaicked image. In the output directory, the ortho-rectified image for each image will be stored. The
resultant images after ortho-rectification are named in a specific rule: image
ID_ortho.tif. The data type of ortho-rectified images, as well as the number of
bands, is the same as that of original images, e.g., unsigned 8 for original
image, still unsigned 8 for ortho-rectified image. The file format of resultant
images is TIFF. The output ortho-mosaicked image should also be stored in the
output directory.
No-data value
in the output setting is the value used to fill in the area without intensity
value (area with no-data value) in the resultant ortho-image.
The value is also called as invalid value or background value.
After finishing
the setting of configuration options, input and output setting, users can click
the button of “Execute”. The called program, uavOrtho.exe, starts to run and
the required time to finish the whole procedure is different according to the
size of the UAV block. In the course of computation, the buttons of “Execute”
and “Cancel” on the bottom of the form is invalid. The two buttons can not be clicked in case they are clicked many times in
the course of running. Users can learn the progress and the running status via
the re-directed output printing (sometime printing may delay) on the right
side. User can also check the information of resources (CPU, memory and Disks)
possessed by the program from Task Manager and Resource Monitor of Windows OS.
Once the execution of uavOrtho.exe is finished, a message box will pop up
showing that the processing is closed successfully or terminated (aborted).
After clicking OK button on the message box, the GUI program returns to the
available status. Users can either click the button of “Cancel” on the bottom
or click the closing icon on the up-right corner of the interface to close this
GUI program. Or users can select and set new input and output to fulfill a new
task.
User can click
the button of “Terminate” on the bottom if they need to abort the processing
(not the closing of GUI form). The GUI program, uavOrthoForm.exe, will kill the
process of uavOrtho.exe which is being called. Killing the process of
uavOrtho.exe may delay (less than one second or several seconds). Once the process
is killed, a message box will pop up showing that the processing is terminated
(aborted) or closed successfully. After clicking OK button on the message box,
the GUI program returns to the available status. Users can either click the
button of “Cancel” on the bottom or click the closing icon on the up-right
corner of the interface to close this GUI program. Or users can select and set
new input and output to fulfill a new task.
Attention: the
button of “Cancel” on the bottom is only for closing the GUI program. If the
called logical program (i.e., uavOrtho.exe) is running, users should first
click the button of “Terminate” to abort the processing task or wait until the
processing task is finished, and then close the GUI program. Users can not click
the button of “Cancel” or click the closing icon on the up-right corner of the
interface to close this GUI program when the called logical program is running.
The blank area
of the right side will display the information printed by the command program,
and the printed information will also be saved in a log file named as uavOrtho_ddMMMyyyyHHmmss_log.txt.
In the filename, dd are two digital numbers
indicating a date, MMM are three English characters indicating an abbreviation
of a month, yyyy are four digital numbers indicating
a year, and HHmmss are digital numbers indicating
hour, minute and second in the form of 24 hours. The log file is also stored in
the work directory.
All configuration
options are saved in the configuration file, uavOrtho.conf,
through a certain type of form in the course of running of program. The
configuration file can be used in the action of loading configuration.
At the same
time, a list file named ortho_List.txt is generated, which is saved in the
output directory. The list file includes, in sequence, all filenames of
ortho-rectified images whose order is the same as that in the list of exterior
elements of images. The format of the list is as follows:
H:\uav_tests\MASI\orthoDir\DSC00305_ortho.tif
H:\uav_tests\MASI\orthoDir\DSC00306_ortho.tif
H:\uav_tests\MASI\orthoDir\DSC00307_ortho.tif
H:\uav_tests\MASI\orthoDir\DSC00308_ortho.tif
H:\uav_tests\MASI\orthoDir\DSC00309_ortho.tif
….
Step 6: Comparing surface height
and change finding
By comparing
DSMs of two different phases, the program can automatically find change of the
surface height and calculate the value of changed height. Clicking the icon
showing “Surface Change” in the main interface,

The operating
interface of change of surface height is launched.
Attention: the
datasets in the interface may probably be not the results from UAV images. The
purpose of this step is to demonstrate how to operate.

The
corresponding DSM files are selected in the sections of the previous DSM and
the next DSM, respectively. After processing, the file of height difference is
obtained. Users can set two parameters, the height threshold and no-data value.
The height
threshold: If the height difference is less than the threshold, the difference
is not interesting and it will be assigned as no-data value in the resultant file.
For the case where the height difference is more than the threshold, the real
difference will saved in the resultant file.
No-data: no-data
is the value used to fill in the area without change of surface height (or
invalid area) in the resultant file. No-data can be determined either from
input DSM or from the right side list box.
Step 7: Automatic DSM2DTM
Clicking the icon showing “DSM
to DTM” in the main interface,
The operating
interface of automatic DSM2DTM is launched.
Attention: the
datasets in the interface may probably be not the results from UAV images. The
purpose of this step is to demonstrate how to operate.

The program
adopts an algorithm with multilevel triangle-based ground filtering. It deletes
the non-grounded objects like buildings, trees in DSM and transforms the DSM to
DTM where the pure ground height is saved. The input file is DSM source and the
output file is resultant DTM.
The meaning of
parameters is as follows:
The predefined size: the defined size in which the lowest point is
selected as a ground point; unit: the same as the grid spacing (cell size),
e.g., 40.0. It means that the lowest point in a grid, whose sizes of width and
height are both 40 meters (assuming the unit of grid spacing is meter), is
taken as a ground point. The higher is the predefined size, the more levels in
the pyramids are generated. Level number of pyramids decrease, then the built triangles
is to be dense. This parameter is usually decided by the size of the biggest
non-ground object in the terrain area. If the predefined size is less than the
size of non-ground object, these objects will not be filtered out. On the
contrary, if the predefined size is too large to maintain some terrain details.
Thus, users need find a balance between filtering out big non-ground objects
and maintaining the terrain details in the light of the requirements of
applications.
Level, to which level the DSM is filtered. The higher is the level set,
the less ground points are generated, the less terrain details remain, and the
more efficient is the processing. The lower is the level set, the more ground
points are generated, the more terrain details remain, and the less efficient
is the processing. Usually the triangulation of mass points and searching a
specific triangle in a huge triangulation is inefficient. The level set can not be higher than (the highest level - 1), level is
0-based, e.g., 3.
The threshold
of distance: the threshold of distance from
a point to the corresponding triangle. In the course of filtering, a point
whose distance to its corresponding triangle is more than the threshold is
deemed as a non-ground point, vice versa, e.g., 1.0 meter. If the value of
threshold is low, there are less ground points which will survive in the
filtering processing and there are also some risks that the true ground point
may be filtered out by taking them as non-ground points.
The size of
block: for processing large raster, block division is needed. Filtering is
fulfilled, block by block, and its size must bigger than two times of
overlapping size, e.g., 6144. Usually the default value is used. The reason
that block division is used is that a large DSM will result in huge ground points
which require huge computation for the filtering processing. The block division
is a way which promotes computational efficiency and saves memory consumption.
The size of
overlap between blocks: the size of overlap between the adjacent blocks, e.g. 128.
The overlay ensures the rightness of border of each block. Usually the default
value is used.
No-data:
no-data is the value used to fill in the area without height value. Because
each grid in raster file must be assigned a value, for some cases where there
are no real height values in some areas, the concept of no-data is introduced.
No-data can be determined either from input DSM or from the right side list box
in this interface.
If there are
some non-ground objects which are not
filtered out, such as buildings and vegetation areas, or small areas of errors
in the resultant DTM in this step, the interactive tool for editing DSM/DEM
(i.e., collectPolygons.exe)
can be used for editing. For more details, please refer to “Usage of the
collectPolygons.exe program”.
Step 8: Height estimation of
building / tree
Clicking the icon showing “Building
height” in the main interface,
The operating
interface of height estimation of building / tree is launched.
Attention: the
datasets in the interface may probably be not the results from UAV images. The
purpose of this step is to demonstrate how to operate.

The
corresponding files are selected in the sections of the ground height (DTM) and
the surface height (DSM), respectively. After processing, the file of building
/ tree height is obtained. Users can set two parameters, the height threshold
and no-data value.
The height
threshold: the height being less than the threshold is the value which is not
interesting or the possible existing errors. The value will be replaced by
no-data in the file of building / tree height. The height being more than the
threshold is an interesting and reliable value, which as a true value will be
saved in the file of building / tree height.
No-data:
no-data is the value used to fill in the area without building / tree (or
invalid area) in the resultant file. No-data can be determined either from
input DSM or from the right side list box.
Step 9: Applications
Clicking the icon showing “App”
in the main interface,
The following
menu will pop up.

Currently two applications modules are included, i.e.,
volume calculation and automatic extraction of building
attributes in the light of buildings footprints.
Volume
calculation: a polygon in the vector form in which volume is calculated and
highly dense DSM are given, the module estimates the volume of objects (e.g.,
sands, small stones, coal, mineral particles and garbage) occupying the area.
For more details, please refer to “Usage of the calVolume.exe and
calVolumeForm.exe programs”. Users can click the command item, Polygons Drawing
Tool, in above menu to launch the interactive tool, collectPolygons.exe, to
collect the polygon and save it.
Automatic
extraction of building attributes: a vector file with ERSI shape format, which
including multiple polygons of building footprint, and the corresponding nDSM dataset are given, the module automatically extracts
the center position (x, y coordinates) of building, area of ground, height of
building, number of layers, and construction area of building for each
building. Moreover, these extracted values are set as new attributes for these
polygons. nDSM can either be
obtained by subtracting DTM from DSM in the module of buildingHeightForm.exe,
or be obtained by calculating difference between two DSMs in the module of
surfaceChangeForm.exe. The former can be used to extract building height from
the bottom to top, number of layers, etc., while the latter can be used to
automatically find new, illegal, added, demolished, or height-exceeded
buildings and extract their attributes, such as position, height, layers,
ground area, and construction area of these found buildings. For more details,
please refer to “Usage of the extBldgAttributes.exe and
extBldgAttributesForm.exe programs”. Users can click the command item, Polygons
Drawing Tool, in above menu to launch the interactive tool, collectPolygons.exe,
to collect polygons on nDSM and save them to a vector
file. Polygons of building footprint in vector file can also be from third
party source. For both cases, it is required that building footprints are
accurately aligned with the actual boundaries of buildings. And, the vector
file including polygons and the nDSM file should be
geo-coded and the underlying coordinate system is the same.
Step 10: 3D modeling with true color textures
Clicking the icon showing “Textured 3D Model”
in the main interface,
The following
menu will pop up.

By clicking the command item, textured 3D modeling, the
GUI program is launched as follows:

All files required in the course of generation of 3D
models should be put in the same directory and the directory is set as work
directory. The required files are DSM file, image files used for texture mapping,
the file of interior parameters of camera, and the list file of exterior
elements in a UAV block. Users should copy all these files to a directory and
set it as work directory.
The image file used for texture mapping in the work
directory is associated with the image filename via the image ID in the list
file of exterior elements. Image ID plus extension is the name of image file.
The data type of the images which are used for texture mapping is unsigned 8
bit integer. If it is not, user should stretch the images to unsigned 8 bit
using the autoStretch.exe program provided by MASI software (the command item,
automatically stretch image to 8 bit, in the above menu to call the function).
In the input
files, users should select the DSM file and the list file of exterior elements.
Then, users can set configuration options and other setting. For the meaning of
configuration options and operating method, please refer to “Usage of the aerialScene3D.exe and aerialScene3DForm.exe programs”.
Hereto, the
whole flowchart for UAV images is finished, including automatic multi-view stereo and
generation of highly dense DSM, automatic 3D
modeling with true
color textures, automatic (true) ortho-rectification,
automatic finding change of surface height, automatically transforming DSM to
DTM, height estimation of building / tree,
volume calculation, extraction of building attributes, etc. If the functions,
such as image displaying, interactive editing of DSM/DEM, collecting
polygons, automatic
mosaic (mosaic of DSMs, mosaic of ortho-rectified
images, mosaic of histogram matched images), transforming
RGB image to grey image, rotation of image, reflection of image, transforming
point clouds to surface in the form of raster, transforming DSM with raster form
to point clouds, image cropping, and creating overviews for image, are needed,
please refer to user manual of the software.